Introducción al seguimiento de imágenes planas
El seguimiento de imágenes planas (Planar Image Tracking) se utiliza para detectar y rastrear objetos planos texturizados en la vida cotidiana. Los objetos denominados "planos" pueden ser pequeños como un libro, una tarjeta de visita o un póster, o grandes como una pared con grafitis. Estos elementos poseen superficies planas con texturas ricas y no repetitivas.
Este artículo resume los principios básicos, efectos esperados y esquemas de adaptación de plataforma para la detección y seguimiento de imágenes planas, ayudándote a comprender rápidamente los límites funcionales y puntos clave de desarrollo.
Principios básicos
Comprender estos principios ayuda a los desarrolladores a optimizar los efectos de reconocimiento y evitar problemas comunes.
Flujo central
Fase de carga y preprocesamiento:
- El sistema carga la imagen objetivo, extrae numerosos puntos característicos visuales, genera una descripción de características de esta imagen y la inserta en una base de datos de características.
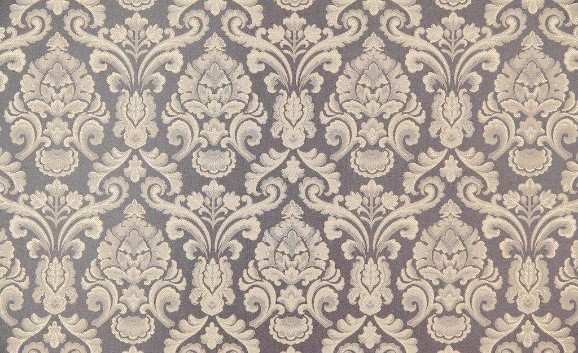
- Las imágenes con más textura son más fáciles de reconocer y rastrear. Puedes usar la herramienta de detección de imágenes objetivo para verificar previamente la reconocibilidad de tu imagen objetivo.

Imagen de referencia izquierda: textura rica, fácil de reconocer (5 estrellas); Imagen de referencia derecha: elementos simples, falta de textura, difícil de reconocer (1 estrella).
Recomendamos imágenes con calidad de 4~5 estrellas como imágenes objetivo.Fase de detección y seguimiento en tiempo real:
- Después de capturar imágenes, la cámara analiza los puntos característicos del fotograma actual y los compara con la base de datos de características de la imagen objetivo.
- Calcula la pose (posición + rotación) de la imagen en el espacio 3D mediante el algoritmo PnP (Perspective-n-Point).
- Una vez detectado el objetivo, el sistema entra en modo de seguimiento. Compara fotogramas consecutivos y analiza el movimiento entre ellos para lograr un seguimiento en tiempo real.
Mecanismos de optimización:
- Recuperación tras pérdida de seguimiento: Re-detección automática tras oclusiones breves o desenfoque por movimiento rápido.
- Seguimiento simultáneo de múltiples objetivos: Controla el número concurrente mediante el parámetro
Simultaneous Number, permitiendo que un solo Tracker rastree múltiples objetivos.
Limitaciones técnicas
- Solo admite imágenes planas (no objetos 3D o contenido dinámico).
- Depende de la iluminación ambiental: oscuridad o sobreexposición dificultan la detección o causan pérdida de seguimiento.
- Durante la detección, la cámara no debe estar demasiado lejos del objetivo, garantizando que ocupe al menos el 30% del fotograma.
- El seguimiento multiobjetivo está limitado por el rendimiento del dispositivo: PC puede rastrear >10 objetivos, dispositivos móviles 4~6 objetivos planos.
Efectos y resultados esperados
Tras comprender el funcionamiento y limitaciones, es necesario conocer los efectos alcanzables. Esto ayuda a establecer estándares de prueba razonables durante el desarrollo.
Efectos ideales
- Superposición precisa: Los objetos virtuales se alinean con los bordes de la imagen.
- Detección rápida: Latencia ultrabaja desde la carga de la app hasta la detección exitosa.
- Seguimiento estable: Mantiene el rastreo durante rotaciones, movimientos u oclusiones parciales de la imagen.
Casos no ideales y soluciones
| Fenómeno | Causa | Percepción del usuario | Vista previa de solución (detalles en secciones posteriores) |
|---|---|---|---|
| No reconocible | Textura insuficiente, tamaño pequeño | Objeto virtual no aparece | Optimizar imagen objetivo, usar herramienta de detección |
| Seguimiento tembloroso | Objeto demasiado pequeño en pantalla, pocos puntos rastreables | Objeto virtual oscila visiblemente | Evitar alejarse del objetivo, usar modo PreferQuality |
| Pérdida frecuente | Movimiento rápido u oclusión total | Objeto virtual parpadea/desaparece | Estabilizar dispositivo/objetivo o aumentar tamaño objetivo |
| Falta de objetivos múltiples | Limitaciones de hardware | Algunos objetivos no se rastrean | Ajustar parámetro Simultaneous Number según rendimiento |
Métodos de verificación de resultados
- Desarrollo: Usar cámara de PC en modo Play del editor de Unity.
- Pruebas: Usar escenas Sample oficiales o imágenes de prueba propias, cubriendo diferentes condiciones de luz/ángulo/distancia.
Mejores prácticas para imágenes objetivo
La efectividad del seguimiento depende críticamente de la calidad de la imagen objetivo. Para garantizar la tasa de reconocimiento, sigue estas pautas al preparar imágenes objetivo.
Según el escenario, puedes prepararlas de varias formas: fotografiando directamente el objeto o diseñando patrones para impresión. Tanto fotos como diseños pueden usarse como imágenes plantilla.
Requisitos básicos
- Formato de imagen: Recomendado JPG o PNG.
- Manejo de canal alfa: Si la imagen tiene canal alfa, el sistema la procesa con fondo blanco. Evita canales alfa si no es el efecto deseado.
Puntos clave de optimización
Garantizar detalles texturizados ricos
La plantilla debe tener suficientes detalles y variaciones de bordes, evitando gráficos simples o monocromáticos.

Referencia izquierda: imagen texturizada detectable; Referencia derecha: imagen monocromática no detectable
Evitar patrones repetitivos
Patrones regulares (como tableros de ajedrez o rayas) reducen la unicidad de los puntos característicos.
Referencia: patrón repetitivo no rastreable
Contenido que llene el fotograma
El sujeto debe ocupar la mayor parte posible de la imagen, minimizando áreas vacías.
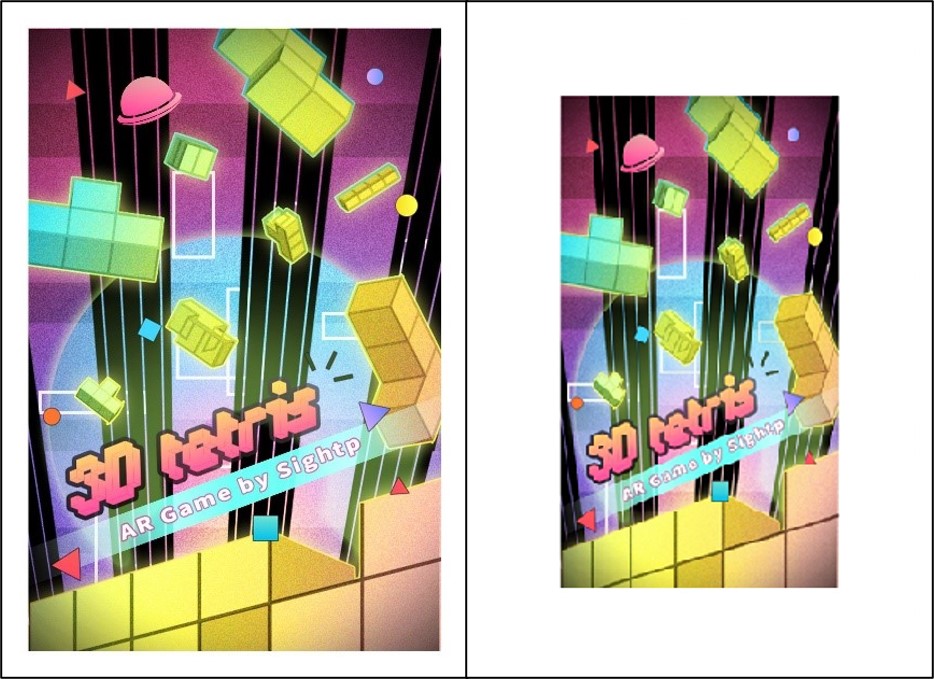
Referencia: imagen con sujeto prominente (izquierda) es más fácil de detectar/rastrear que con espacios vacíos (derecha)
Controlar proporciones
Evitar imágenes excesivamente alargadas. El lado corto debe ser ≥20% del lado largo.

Referencia: imagen estrecha difícil de rastrear
Seleccionar resolución adecuada
Rango recomendado: Entre SQCIF (128×96) y QVGA (1280×960).
Muy pequeña: Puntos característicos insuficientes, tasa de reconocimiento baja.
Muy grande: Aumento innecesario de memoria y tiempo de cálculo al generar datos Target.