Введение в отслеживание плоских изображений
Отслеживание плоских изображений (Planar Image Tracking) используется для обнаружения и отслеживания текстурированных плоских объектов в повседневной жизни. Под "плоскими" объектами понимаются предметы с ровной поверхностью, такие как книги, визитки, плакаты или даже крупные цели, например, граффити-стены. Эти объекты обладают плоской поверхностью и богатой, неповторяющейся текстурой.
В этой статье представлен обзор основных принципов обнаружения и отслеживания плоских изображений, ожидаемых результатов и вариантов адаптации для платформ, что поможет вам быстро понять границы функциональности и ключевые моменты разработки.
Основной процесс
Понимание этих принципов поможет разработчикам оптимизировать распознавание и избежать распространенных проблем.
Основной процесс
Этап загрузки и предварительной обработки:
- Система загружает целевое изображение, извлекает из него множество визуальных особых точек, генерирует дескриптор признаков этого изображения и добавляет его в базу признаков.
- Изображения с богатой текстурой легче распознавать и отслеживать. Вы можете заранее проверить распознаваемость вашего целевого изображения с помощью инструмента проверки целевых изображений.

Слева: изображение с богатой текстурой, легко распознается (5 звезд). Справа: простые элементы, недостаток текстуры, сложно распознать (1 звезда).
Рекомендуем использовать целевые изображения с качеством 4-5 звезд.Этап обнаружения и отслеживания в реальном времени:
- После захвата кадров камерой система анализирует особые точки текущего изображения и сопоставляет их с базой признаков целевого изображения.
- С помощью алгоритма PnP (Perspective-n-Point) вычисляется поза (положение + вращение) изображения в 3D-пространстве.
- После успешного обнаружения цели система переходит в режим отслеживания. Она сравнивает последовательные кадры и анализирует движение между ними, обеспечивая отслеживание в реальном времени.
Оптимизационные механизмы:
- Восстановление после потери отслеживания: Система автоматически перезапускает обнаружение цели после кратковременного перекрытия или сильного размытия при быстром движении.
- Одновременное отслеживание нескольких целей: Параметр
Simultaneous Numberконтролирует количество целей, которые один Tracker может отслеживать одновременно, позволяя отслеживать несколько целей одним вызовом Tracker.
Технические ограничения
- Поддерживаются только плоские изображения (не 3D-объекты или динамический контент).
- Зависит от освещения: слишком темная или пересвеченная сцена затрудняет обнаружение или приводит к потере отслеживания.
- При обнаружении камера не должна быть слишком далеко от цели. Целевое изображение должно занимать не менее 30% площади кадра.
- Количество одновременно отслеживаемых целей ограничено производительностью устройства. Обычно на ПК можно отслеживать более 10 целей, на мобильных устройствах — 4-6 плоских целей.
Результаты и ожидания
Понимая механизмы работы и технические ограничения, важно также знать, каких результатов можно достичь. Это поможет установить разумные критерии тестирования в процессе разработки.
Идеальные результаты
- Точное наложение: Виртуальные объекты точно совмещены с краями изображения.
- Быстрое обнаружение: Сверхнизкая задержка от загрузки приложения до успешного обнаружения.
- Стабильное отслеживание: Отслеживание сохраняется при вращении, перемещении или частичном перекрытии изображения.
Неидеальные ситуации и решения
| Явление | Причина | Восприятие пользователя | Краткое решение (подробнее в следующих разделах) |
|---|---|---|---|
| Не распознается | Недостаток текстуры, слишком маленький размер | Виртуальный объект не появляется | Оптимизировать целевое изображение, проверить распознаваемость инструментом |
| Дрожание отслеживания | Цель занимает слишком малую площадь кадра, недостаточно точек для отслеживания | Заметное дрожание виртуального объекта | Избегать слишком большого расстояния до цели, установить режим отслеживания PreferQuality |
| Частая потеря цели | Быстрое движение цели или полное перекрытие | Мерцание/исчезновение виртуального объекта | Стабилизировать устройство/целевое изображение, увеличить размер цели |
| Пропуск целей при множественном отслеживании | Ограничения производительности оборудования | Некоторые целевые изображения не отслеживаются | Установить разумный параметр Simultaneous Number, учитывая производительность |
Методы проверки ожидаемых результатов
- Этап разработки: Использовать веб-камеру ПК в режиме Play редактора Unity для предварительного просмотра.
- Этап тестирования: Использовать официальные сцены Sample или создать свои тестовые изображения, охватывающие различные условия освещения/угла/расстояния.
Лучшие практики для целевых изображений
Эффективность отслеживания плоских изображений сильно зависит от качества целевого изображения. Для обеспечения высокой вероятности распознавания рекомендуется следовать следующим правилам при подготовке изображений.
В зависимости от сценария использования, вы можете подготовить целевое изображение разными способами: сфотографировать объект прямо под прямым углом или сначала разработать дизайн, а затем напечатать. Как фотографии, так и дизайн-макеты могут служить шаблонными изображениями.
Базовые требования
- Формат изображения: Рекомендуется JPG или PNG.
- Обработка альфа-канала: Если изображение имеет прозрачность (альфа-канал), система обработает его как белый фон. Если это нежелательно, избегайте прозрачности.
Ключевые моменты оптимизации
Обеспечьте богатую текстуру и детализацию
Шаблонное изображение должно иметь достаточное количество деталей и перепадов краев. Избегайте однотонных заливок или простых геометрических фигур.

Слева: изображение с богатой текстурой, может быть обнаружено. Справа: однотонное изображение, не может быть обнаружено.
Избегайте повторяющихся паттернов
Узоры с регулярным повторением (например, шахматная доска, полосы) снижают уникальность особых точек.
Пример: изображение с повторяющимся паттерном не может быть отслежено.
Контент должен заполнять кадр
Основной объект должен занимать максимальную площадь изображения, минимизируя пустые области.
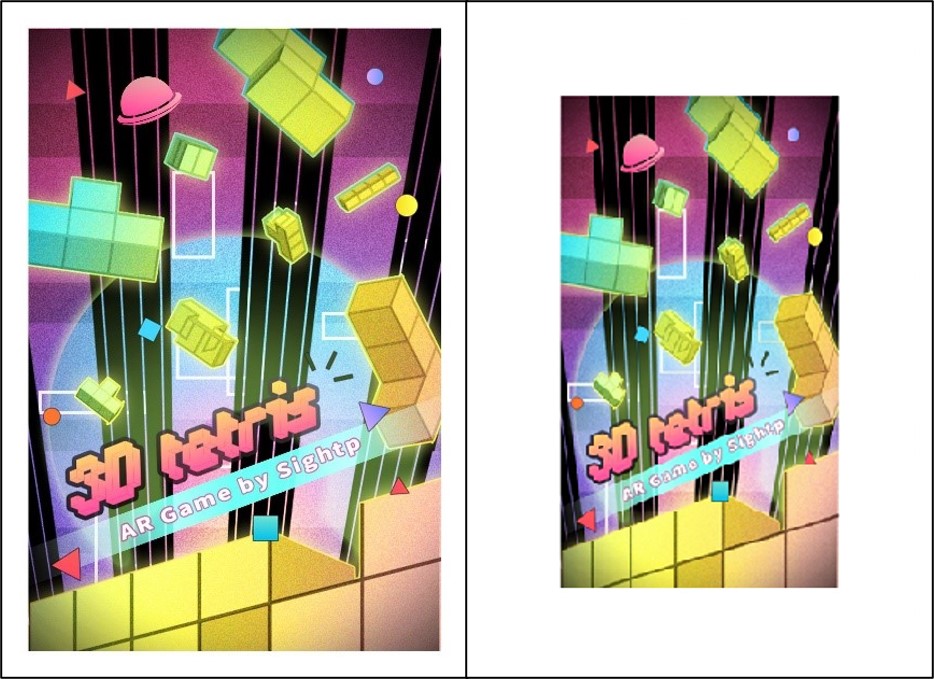
Слева: изображение с заполненным объектом легче обнаружить и отследить. Справа: изображение с избытком пустого пространства.
Контролируйте соотношение сторон
Изображение не должно быть слишком вытянутым. Длина короткой стороны должна составлять не менее 20% от длины длинной стороны.

Пример: вытянутое изображение сложно отслеживать.
Выберите подходящее разрешение
Рекомендуемый диапазон: От SQCIF (128×96) до QVGA (1280×960).
Слишком маленькое: Недостаточно особых точек, снижается вероятность распознавания.
Слишком большое: Неоправданно увеличивает затраты памяти при генерации данных Target и время вычислений.