ロスレスフルアップデートマッピング
本文では、単一マップと複数マップのロスレスフルアップデートマッピングの完全な操作フローを詳細に説明します。タスク作成、データアップロード、マッピング操作、結果確認を含み、既存の座標系を維持したままシーンの更新を完了するのに役立ちます。
単一マップのロスレス更新マッピング
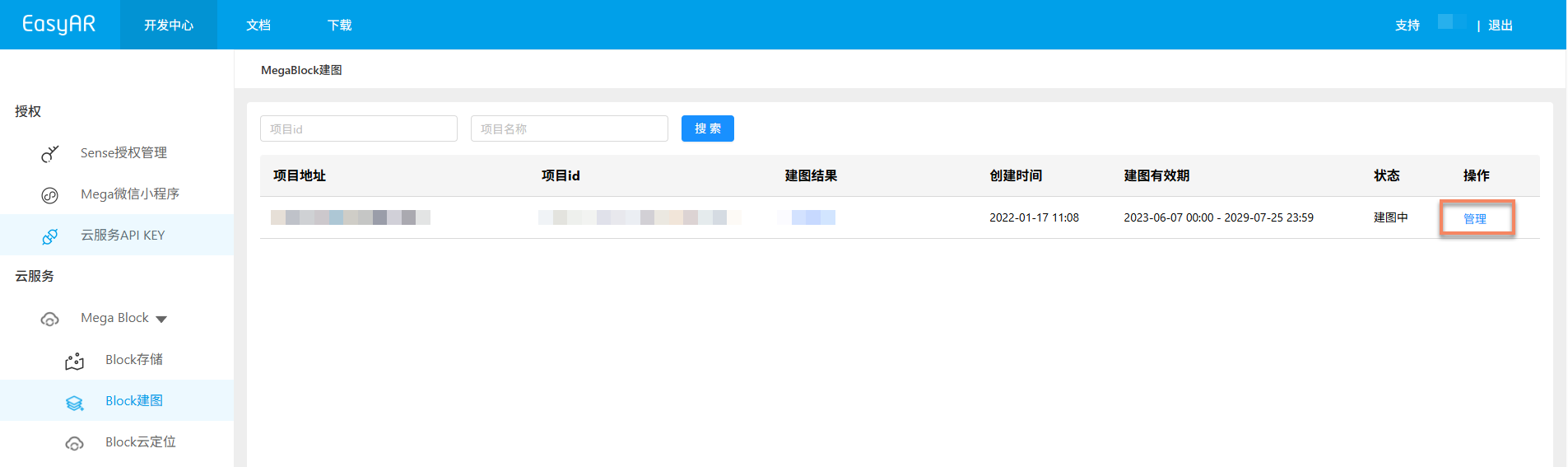
EasyAR 開発センターにログインし、左メニューバーで Mega Block -> Block マッピング を選択し、該当するプロジェクトアドレスを選択後、管理 ボタンをクリックしてマッピングタスク画面に入ります。
単一マップロスレス更新タスクの作成とデータアップロード
ロスレス更新が必要な単一マップタスクを選択し、
ロスレス点群アップグレードボタンをクリックします。
ポップアップで以下の情報を入力します:
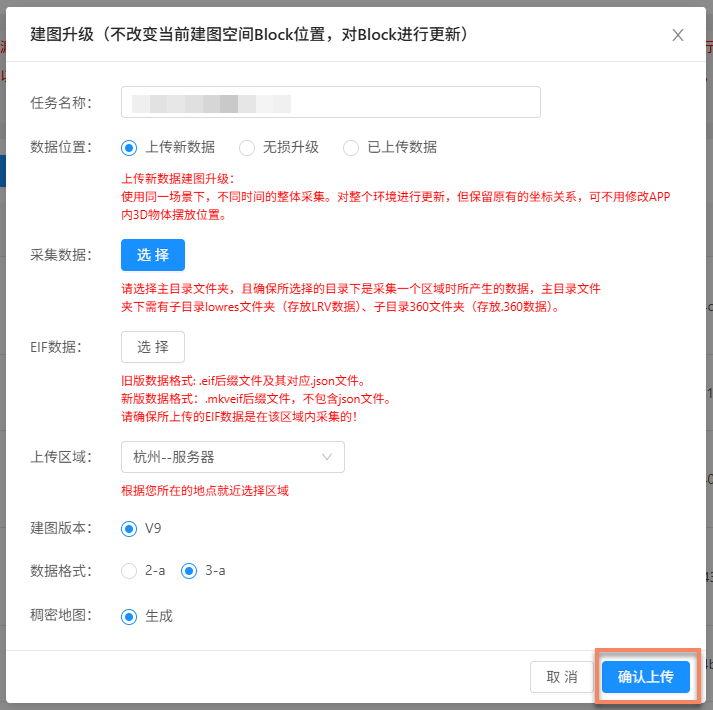
- タスク名: 今回のロスレスフルアップデートタスクの名前を入力します。
- データ準備: 通常の単一マップタスクデータ準備を参照してください。
- データ位置:
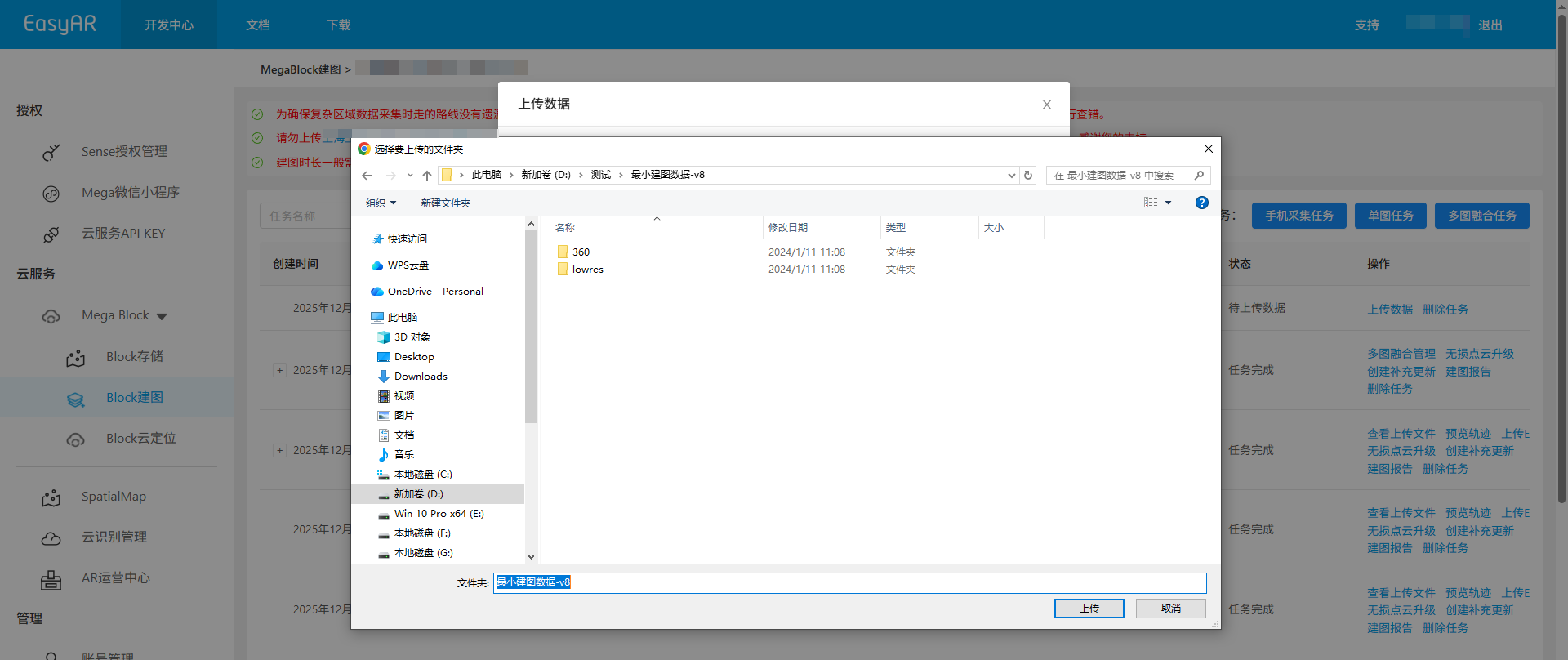
新規データをアップロードを選択します。 - 収集データ:
選択をクリックし、データメインディレクトリフォルダを選択後、アップロードをクリックします。
- EIF データ: 必須項目ではありません。
選択ボタンをクリックし、対応する EIF データファイルをアップロードします。マッピング開始後はEIF データの追加アップロードが可能です。 - アップロードリージョン: アップロード操作者の所在地に基づき近隣を選択します。
- マッピングバージョン: デフォルトで最新バージョン V9 を使用します。
- データフォーマット: 最新バージョン 3-a の使用を推奨します。
すべての情報に誤りがないことを確認後、
アップロードを確認ボタンをクリックしてタスクを送信します。リストにアップロード進捗とステータスが表示されます。
データアップロード中は、PCの電源を入れ、ネットワーク接続を維持し、ブラウザを閉じたり、ページをリフレッシュしたり、他のメニューをクリックしたりしないでください。中断した場合、操作をやり直す必要があります。
マッピングを開始
アップロード完了後、タスクは自動的に 審査中 になります。下図を参照してください。

審査が通るとタスクは自動的にマッピングフローに入り、ステータスは キューイング中 または 生成中 と表示されます。下図を参照してください。マッピング完了までお待ちください。

マッピング結果の確認
タスクがマッピングフローに入ると、タスクステータス でマッピングタスクが完了したか判断できます。ステータスが タスク完了 または 生成失敗 と表示された場合、マッピングタスクが終了したことを示します。

マッピング成功
タスクステータスが タスク完了 と表示された場合、マッピングが成功し、結果が生成されたことを示します。この時、マッピング結果をさらに確認し、期待される要件を満たしているか確認できます。
マッピング結果の確認方法:
マッピング失敗
タスクステータスが 生成失敗 と表示された場合、マッピングが失敗したことを示します。以下の方法で問題を調査することをお勧めします:
- マッピングレポートを確認: マッピングレポートを表示し、レポート情報に基づいて解決策を探します。
- トラブルシューティングを参照: マッピング失敗トラブルシューティングガイドを参照し、一般的な問題の解決方法を入手します。
- テクニカルサポートに連絡: 上記の方法で問題が解決しない場合、EasyAR スタッフに連絡し、マッピングレポートの
JobIDを提供して問題を迅速に特定してください。
複数マップのロスレス更新マッピング
EasyAR 開発センターにログインし、左メニューバーで Mega Block -> Block マッピング を選択し、該当するプロジェクトアドレスを選択後、管理 ボタンをクリックしてマッピングタスク画面に入ります。
複数マップロスレス更新タスクの作成
ロスレス更新が必要な複数マップタスクを選択し、
ロスレス点群アップグレードボタンをクリックします。
ポップアップダイアログでタスク名を入力し、マッピングバージョンとデータフォーマット(最新バージョンの使用を推奨)を選択します。入力完了後、
追加を確認をクリックして複数マップ点群ロスレス更新タスクを作成します。
サブマッピングの追加
複数マップロスレス更新タスク作成後、各独立収集エリアにサブマッピングタスクを追加する必要があります。
複数マップ融合管理をクリックし、該当する複数マップ融合管理画面に入ります。
サブマッピングを追加をクリックし、タスク名を入力して確認をクリックするとサブマップを作成します。各独立収集エリアごとに1つのサブマッピングタスクを作成する必要があることに注意してください。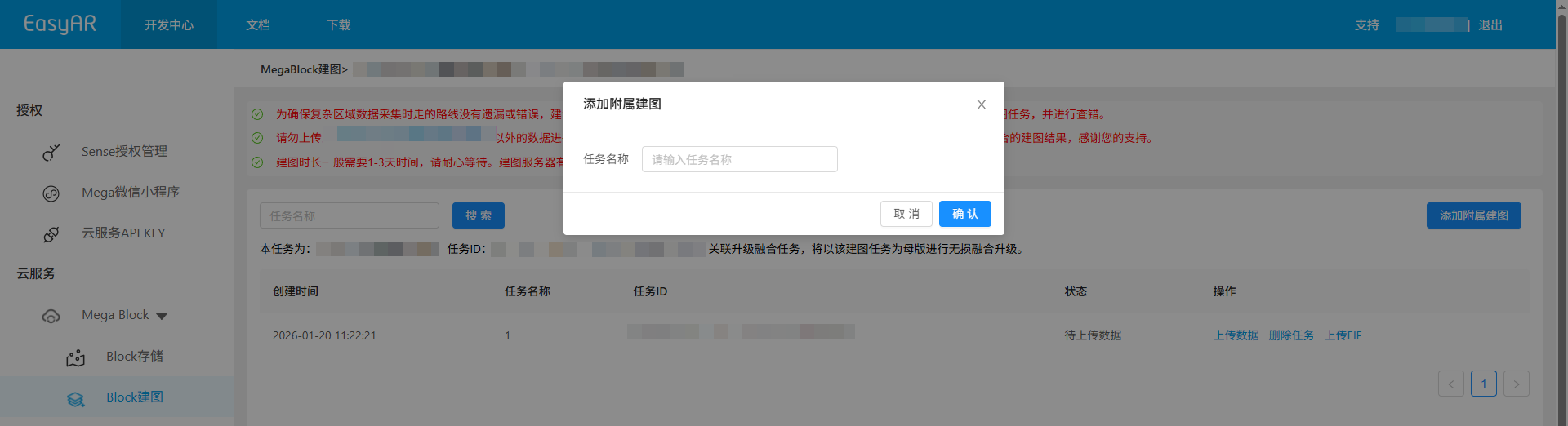
データ準備
データをアップロードする前に、収集された空間データが要件を満たしていることを確認し、仕様に従って整理・保存する必要があります。以下では、データ収集デバイスおよびデータファイルの命名、保存、構造仕様について詳細に説明します。
データのアップロード
データアップロードのルールは単一マップタスクと同じです。該当タスクでデータをアップロードしてください。データアップロードに関しては単一マップタスクのデータアップロードを参照してください。
データアップロード位置の説明: ローカル新規データ または Alibaba Cloud Drive リンク のいずれかの方法でアップロードします。

複数マップロスレス更新マッピングを開始
複数マップロスレス更新マッピングの操作フローは複数マップ融合マッピングと同じです。具体的な操作手順は複数マップ融合タスクのマッピング開始章を参照してください。
マッピング結果の確認
タスクがマッピングフローに入ると、タスクステータス でマッピングタスクが完了したか判断できます。複数マップロスレス更新タスクのステータスが タスク完了、マッピング結果が理想的でない または 生成失敗 と表示された場合、マッピングタスクが終了したことを示します。

マッピング成功
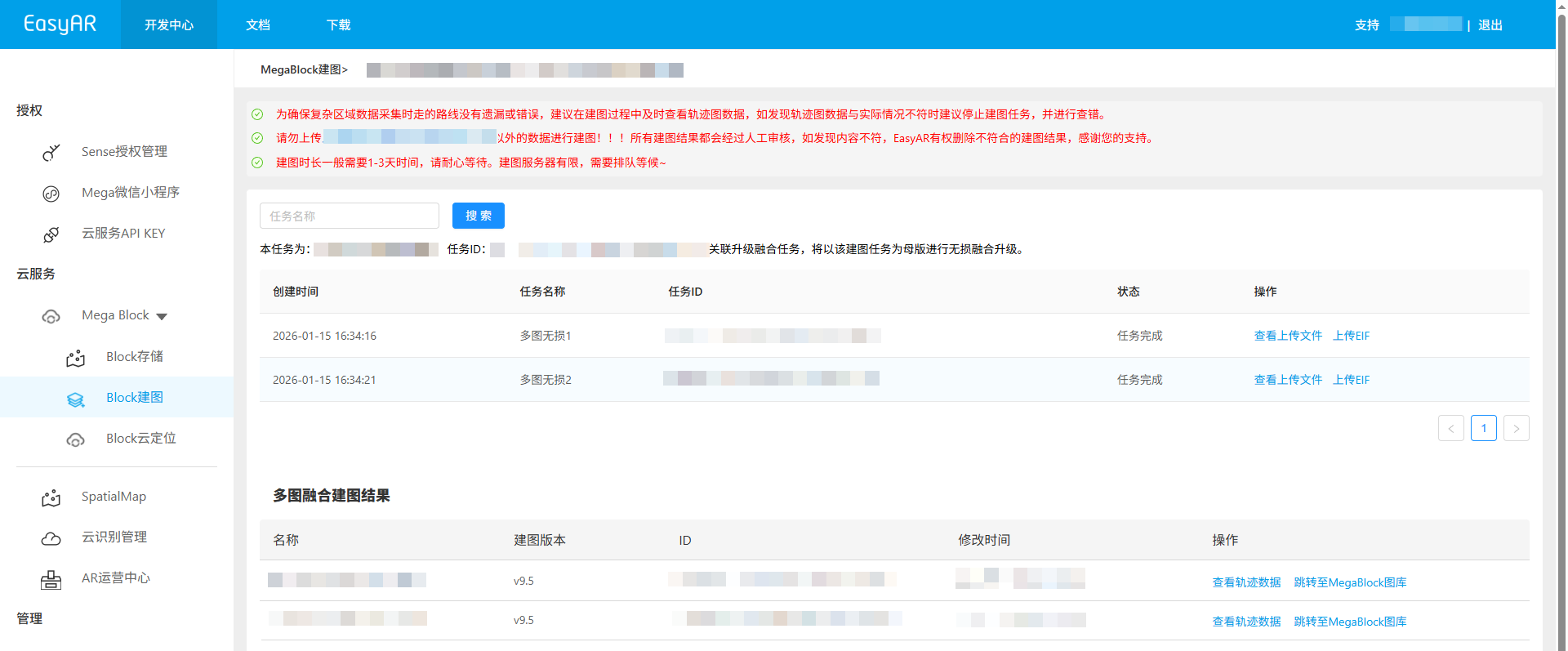
タスクステータスが タスク完了 または マッピング結果が理想的でない と表示された場合、マッピングが成功し、結果が生成されたことを示します。複数マップマッピング完了後、結果は複数マップ融合管理画面に表示されます。
マッピング結果の説明:
タスク完了: マッピングが完了し融合に成功、結果は1つの完全な Mega Block です。
マッピング結果が理想的でない: マッピングは完了したが融合が不十分で、結果は複数の Mega Block です。
マッピング結果が理想的でないステータスが表示された場合、以下のチェックと確認を行うことを推奨します:- 収集ルートの規範: 収集ルートが規範に準拠し、異なるサブマップ間で重複要件を満たしていることを確認します(参照: 収集規範)。
- ファイルアップロードの完全性: すべてのファイルがアップロードされ、漏れがないことを確認します(参照: アップロードファイルのプレビュー)。
- 収集エリアのカバレッジ: 収集エリアが全要件をカバーし、漏れがないことを確認します(参照: 収集ルートを再生)。
- 手動関連付けの正確性: 手動関連付けマッピングを行った場合、サブマップ関係の指定が正確であることを確認します(参照: 手動関連付けマッピング)。
上記のいずれか問題を発見した場合、自身で修正後、タスクを再作成できます。すべてのチェックが問題ないことを確認した場合、解決のためにお問い合わせください。
マッピング結果の確認方法:
マッピング失敗
タスクステータスが 生成失敗 と表示された場合、マッピングが失敗したことを示します。以下の方法で問題を調査することをお勧めします:
- マッピングレポートを確認: マッピングレポートを表示し、レポート情報に基づいて解決策を探します。
- トラブルシューティングを参照: マッピング失敗トラブルシューティングガイドを参照し、一般的な問題の解決方法を入手します。
- テクニカルサポートに連絡: 上記の方法で問題が解決しない場合、EasyAR スタッフに連絡し、マッピングレポートの
JobIDを提供して問題を迅速に特定してください。