Soluzione per spazi mega
Per scenari su larga scala come aree turistiche, quartieri urbani, grandi complessi commerciali che superano centinaia di migliaia di metri quadrati o persino milioni di metri quadrati, il tradizionale modello di "acquisizione singola, mappa unica" non è sufficiente. Questo documento spiega come gestire l'acquisizione e l'utilizzo di scenari mega-spaziali, risolvendo problemi come errori cumulativi eccessivi e overflow di memoria causati da mappe singole troppo estese.
Sfide principali
Quando si gestiscono spazi mega di milioni di metri quadrati, tentare di creare una singola mappa gigante presenta numerosi ostacoli tecnici:
- Difficoltà di acquisizione: sessioni di acquisizione troppo lunghe causano surriscaldamento dei dispositivi e dati eccessivi (centinaia di GB), rendendo estremamente difficile il caricamento e l'elaborazione.
- Errore cumulativo: l'errore di mappatura si accumula con la distanza percorsa. Su percorsi di chilometri, anche un errore dell'1% può causare uno scostamento di decine di metri, difficile da correggere.
- Collo di bottiglia prestazionale: caricare e ottimizzare dati di mappe di milioni di metri quadrati esaurisce istantaneamente la memoria del dispositivo.
Soluzione: segmentazione e fusione
La soluzione standard per spazi mega è dividere per gestire, suddividendo logicamente l'intero scenario in sottoaree fisicamente sovrapposte, acquisendo separatamente ciascuna sottoarea e infine fondendo e ottimizzando tutte le sottoaree. Ciò consente una navigazione fluida durante l'esecuzione tramite caricamento dinamico.
Acquisizione dati
È necessario pianificare secondo il Metodo di acquisizione dati per spazi mega.
- Principio di suddivisione: suddividere lo scenario in base a area, contesto o funzionalità, con ogni sottoarea di circa
centomila metri quadrati. - Requisito di sovrapposizione: le sottoaree adiacenti richiedono
almeno 200 metri di percorso completamente sovrapposto. Maggiore è l'area sovrapposta, migliore sarà la mappa fusa. Assicurarsi un'adeguata sovrapposizione per ottimizzare la fusione delle sotto-mappe adiacenti.
Prima di iniziare l'acquisizione di ogni sottoarea:
- Eseguire la pianificazione del percorso di acquisizione
- Verificare la configurazione del dispositivo GoPro Max o configurazione del dispositivo GoPro Max2
- Leggere e familiarizzare con il metodo di acquisizione
- Conoscere i passaggi per esportare dati da GoPro Max/Max2
Creazione di un'attività di mappatura
- Se è la prima volta che si utilizza Mega per la mappatura, prima è necessario creare un nuovo progetto di mappatura
- Nel Mega Developer Center, creare un'attività di fusione multi-mappa per spazi estesi. Caricando più video acquisiti a blocchi, l'algoritmo cloud mapperà automaticamente unendoli e ottimizzandoli.
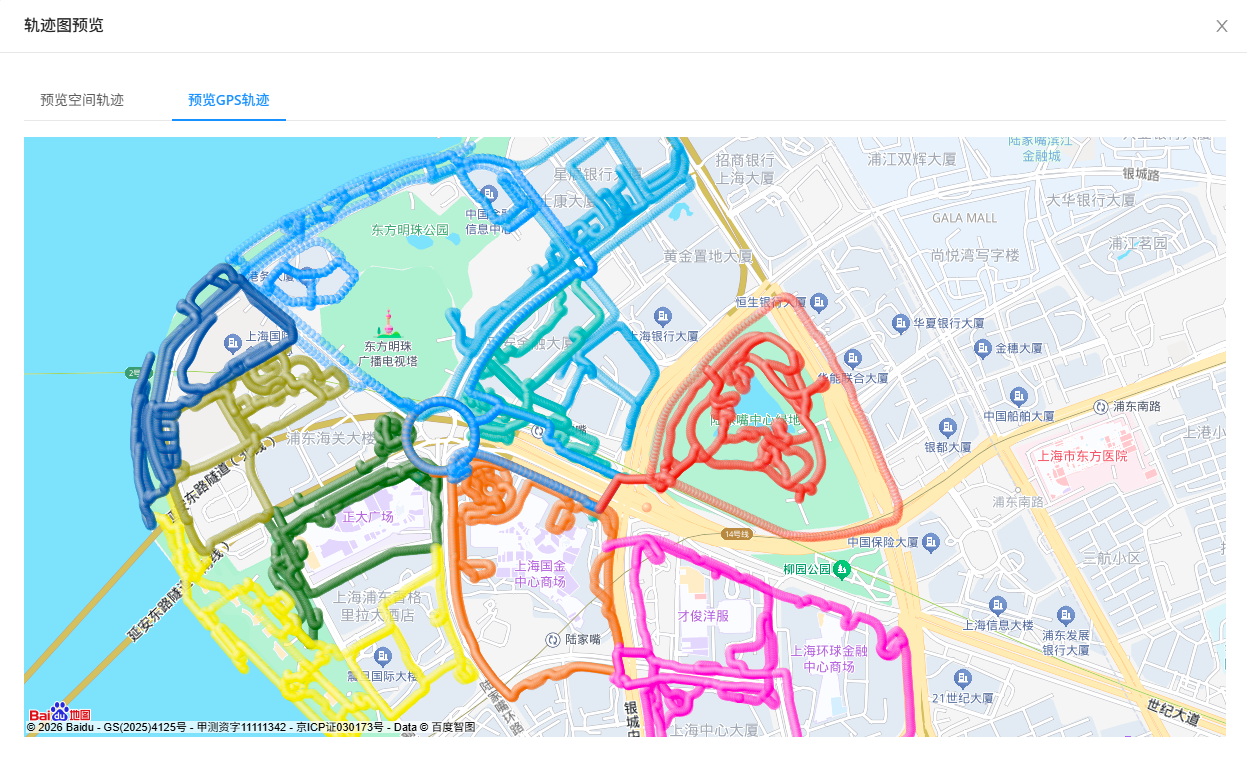
Visualizzazione dei risultati della mappatura
Dopo il completamento della mappatura, è possibile visualizzare i risultati:
Consiglio
- In caso di fallimento della mappatura, consultare la guida alla risoluzione dei problemi di mappatura
- Se la mappatura presenta stratificazioni o altri problemi, consultare la guida alla risoluzione dei difetti del modello
Test dell'effetto di localizzazione
- Se è la prima volta che si utilizza Mega per la localizzazione, è necessario configurare il database di localizzazione
- Verifica rapida della funzionalità del database di localizzazione
- Visualizzare l'effetto di esecuzione simulata
- Visualizzare l'effetto di esecuzione reale sul campo
Strategia di esecuzione
Le mappe fuse non richiedono ulteriori elaborazioni e possono essere utilizzate direttamente come mappe singole.
- Query basate su GNSS: negli scenari esterni, il GNSS assiste nelle query della mappa, garantendo una localizzazione precisa anche su mappe estese.
- Caricamento su richiesta: durante il posizionamento dei contenuti, è possibile caricare separatamente la Mesh di ogni sottoarea.
- Transizione impercettibile:
- L'algoritmo di localizzazione opera contemporaneamente nella sotto-mappa A e B.
- Nelle aree sovrapposte, anche i contenuti subiscono una transizione impercettibile.